
-
La Pinarello Dogma XC è finalmente disponibile al pubblico! Dopo averla vista sul gradino più alto del podio dei campionati del mondo di XC 2023 con Tom Pidcock (con la full) e Pauline Ferrand-Prevot (con la front), Stefano Udeschini ha avuto modo di provarla sui sentieri del Garda
Iscriviti al canale se non l'hai ancora fatto (clicca qui).
Stai usando un browser molto obsoleto. Puoi incorrere in problemi di visualizzazione di questo e altri siti oltre che in problemi di sicurezza. .
Dovresti aggiornarlo oppure usarne uno alternativo, moderno e sicuro.
Dovresti aggiornarlo oppure usarne uno alternativo, moderno e sicuro.
ma no dai è perfettamente comprensibile. sto guardando altri suoi video e sono estremamente interessanti.Sicuramente interessante... peccato sia in dialetto
T
teoDH
Ospite
17 minuti per dire che la cosa migliore è avere
A: un ammo con regolazioni sulle alte e sulle basse anche per il ritorno
B: tarature quasi sempre veloci sulle alte e lavorare sulle basse in base alla tipologia del trail
Che è un po la base delle tarature, mi sarei aspettato approfondimenti maggiori anche perchè, per quel che è la mia esperienza, carri diversi rispondono in modo diverso sia in compressione che in ritorno, quindi spesso quello che si va a ricercare sul ritorno alle basse velocità è un valore effimero, che dipende si dal tipo di trail, ma anche e sopratutto dal tipo di carro, inoltre, posto che possiamo tarare il ritorno sulle basse per affrontare al meglio gli ostacoli più grandi, bisogna anche capire cosa si vuole, parlando di bike park ad esempio, sui salti, perchè ad esempio ritorni veloci che riportano a posto la ruota in fretta sullo scassato tosto, si riflettono poi in una tendenza a scalciare sui salti (cambio di frequenza)
In pratica, la cosa migliore sarebbe avere una telemetria in lettura che adegui il ritorno (e a quel punto anche la compressione) in base a come evolve il trail... studi già ci sono, vedi il progetto iSchock, ma fino a quando, secondo me, non si fa la lettura molto più anticipata, ad esempio con un laser che mappi le sconnessioni che la bici ancora deve affrontare, non raggiungeremo i livelli di quel che ad esempio era stato fatto in Formula1 ai tempi di Senna.
A: un ammo con regolazioni sulle alte e sulle basse anche per il ritorno
B: tarature quasi sempre veloci sulle alte e lavorare sulle basse in base alla tipologia del trail
Che è un po la base delle tarature, mi sarei aspettato approfondimenti maggiori anche perchè, per quel che è la mia esperienza, carri diversi rispondono in modo diverso sia in compressione che in ritorno, quindi spesso quello che si va a ricercare sul ritorno alle basse velocità è un valore effimero, che dipende si dal tipo di trail, ma anche e sopratutto dal tipo di carro, inoltre, posto che possiamo tarare il ritorno sulle basse per affrontare al meglio gli ostacoli più grandi, bisogna anche capire cosa si vuole, parlando di bike park ad esempio, sui salti, perchè ad esempio ritorni veloci che riportano a posto la ruota in fretta sullo scassato tosto, si riflettono poi in una tendenza a scalciare sui salti (cambio di frequenza)
In pratica, la cosa migliore sarebbe avere una telemetria in lettura che adegui il ritorno (e a quel punto anche la compressione) in base a come evolve il trail... studi già ci sono, vedi il progetto iSchock, ma fino a quando, secondo me, non si fa la lettura molto più anticipata, ad esempio con un laser che mappi le sconnessioni che la bici ancora deve affrontare, non raggiungeremo i livelli di quel che ad esempio era stato fatto in Formula1 ai tempi di Senna.
Sorry, my english is not the best.... eheh :) ByeSicuramente interessante... peccato sia in dialetto
Eh? Addirittura una "telemetria laser anticipata" del trail per settare in tempo reale le sospensioni?!17 minuti per dire che la cosa migliore è avere
A: un ammo con regolazioni sulle alte e sulle basse anche per il ritorno
B: tarature quasi sempre veloci sulle alte e lavorare sulle basse in base alla tipologia del trail
Che è un po la base delle tarature, mi sarei aspettato approfondimenti maggiori anche perchè, per quel che è la mia esperienza, carri diversi rispondono in modo diverso sia in compressione che in ritorno, quindi spesso quello che si va a ricercare sul ritorno alle basse velocità è un valore effimero, che dipende si dal tipo di trail, ma anche e sopratutto dal tipo di carro, inoltre, posto che possiamo tarare il ritorno sulle basse per affrontare al meglio gli ostacoli più grandi, bisogna anche capire cosa si vuole, parlando di bike park ad esempio, sui salti, perchè ad esempio ritorni veloci che riportano a posto la ruota in fretta sullo scassato tosto, si riflettono poi in una tendenza a scalciare sui salti (cambio di frequenza)
In pratica, la cosa migliore sarebbe avere una telemetria in lettura che adegui il ritorno (e a quel punto anche la compressione) in base a come evolve il trail... studi già ci sono, vedi il progetto iSchock, ma fino a quando, secondo me, non si fa la lettura molto più anticipata, ad esempio con un laser che mappi le sconnessioni che la bici ancora deve affrontare, non raggiungeremo i livelli di quel che ad esempio era stato fatto in Formula1 ai tempi di Senna.
In questo forum già si grida allo scandalo per il cambio elettronico...
Tu stesso hai scritto un pistolotto (con motivazioni in buona parte condivisibili) contro il progetto dei mozzi che gonfiano automaticamente i copertoni, dicendo che basta fermarsi a gonfiare con la pompetta del Decathlon, e adesso vuoi la telemetria laser? ;)
Già che ci siamo perchè non degli innesti mentali che riproducono le capacità di guida dei migliori rider? Una bella schedina di memoria da infilare... boh, decidi tu, e zac! , ti ritrovi a saper guidare come Gwin o a fare i trick di MacAskill...

your english is absolutely ok for anyone who's not a native english speaker.Sorry, my english is not the best.... eheh :) Bye
easier to understand than native's too.
Ultima modifica:
A me pare di aver capito che è meglio tenere un rebound un filo lento: aiuta in generale la stabilità della bici sugli urti e ostacoli medio grandi. Per il rotto veloce un pò aiutano cmq i sistemi tipo rapid recovery (senon sono presenti le ragolazioni delle alte velocità). Non ho capito un cacchio? =)
Trovo questi articoli sempre interessanti. C'è sempre qualche spunto per sfruttare al meglio il nostro mezzo.
Grazie.
Grazie.
Ciao AndreXTR!
Trovo il tuo approccio molto interessante, ma i contenuti sono pieni di errori, o forse semplificazioni, che portano a conclusioni sbagliate.
1. La regolazione che varia il coefficiente di smorzamento, e quindi la curva di risposta, non è solo il rebound, ma anche la compressione e per entrambi mi riferisco a quelli a 'bassa velocità'.
2. Il rebound alle alte velocità è quello che interviene solo quando la ruota si stacca da terra; il sistema dinamico in questo caso è completamente diverso, infatti la massa da considerare è quella di carro e ruota ossia quella che viene spinta verso il basso dalla molla della sospensione; la si chiude principalmente per evitare che la bici scaldo allo stacco dei salti, mentre la si apre per permettere alla sospensione di distendersi rapidamente.
3. Sugli urti ad alta frequenza, come una pietraia presa in velocità, è esperienza comune che si abbia più controllo chiudendo compressione e ritorno alle alte facendo galleggiare la bici, ovvero non permettendo alla sospensione di insaccarsi al momento dell'urto né di riestendersi tra un ostacolo è l'altro, cosicché in definitiva la ruota salta dalla cima di un ostacolo alla successiva.
4. Nella simulazione l'errore principale sta nel fatto che il manovellismo che simula il terreno è in grado anche di tirare verso il basso la massa che rappresenta la ruota+carro, fatto che in realtà ovviamente non succede.
Infine un errore veniale: la costante elastica delle molle ha dimensioni N/m e non N*m (che sono le dimensioni della coppia meccanica).
Se trovo il tempo nei prossimi giorni faccio delle simulazioni esplicative.
Ciao
Trovo il tuo approccio molto interessante, ma i contenuti sono pieni di errori, o forse semplificazioni, che portano a conclusioni sbagliate.
1. La regolazione che varia il coefficiente di smorzamento, e quindi la curva di risposta, non è solo il rebound, ma anche la compressione e per entrambi mi riferisco a quelli a 'bassa velocità'.
2. Il rebound alle alte velocità è quello che interviene solo quando la ruota si stacca da terra; il sistema dinamico in questo caso è completamente diverso, infatti la massa da considerare è quella di carro e ruota ossia quella che viene spinta verso il basso dalla molla della sospensione; la si chiude principalmente per evitare che la bici scaldo allo stacco dei salti, mentre la si apre per permettere alla sospensione di distendersi rapidamente.
3. Sugli urti ad alta frequenza, come una pietraia presa in velocità, è esperienza comune che si abbia più controllo chiudendo compressione e ritorno alle alte facendo galleggiare la bici, ovvero non permettendo alla sospensione di insaccarsi al momento dell'urto né di riestendersi tra un ostacolo è l'altro, cosicché in definitiva la ruota salta dalla cima di un ostacolo alla successiva.
4. Nella simulazione l'errore principale sta nel fatto che il manovellismo che simula il terreno è in grado anche di tirare verso il basso la massa che rappresenta la ruota+carro, fatto che in realtà ovviamente non succede.
Infine un errore veniale: la costante elastica delle molle ha dimensioni N/m e non N*m (che sono le dimensioni della coppia meccanica).
Se trovo il tempo nei prossimi giorni faccio delle simulazioni esplicative.
Ciao
Claudiop77
Biker forumensus
- 31/3/12
- 2.241
- 1.164
- 0
- Bike
- KindomBike Vendetta Titanio e Orange, una Alutech Fanes 29 ed una Gravel Marin Nicasio +
Se sono già pi bravo di Gwin e MacAskill e voglio il massimo dalle sospensioni .... vai di telemetria Laser ........ Azz io guido una front da enduro ,-)Eh? Addirittura una "telemetria laser anticipata" del trail per settare in tempo reale le sospensioni?!17 minuti per dire che la cosa migliore è avere
A: un ammo con regolazioni sulle alte e sulle basse anche per il ritorno
B: tarature quasi sempre veloci sulle alte e lavorare sulle basse in base alla tipologia del trail
Che è un po la base delle tarature, mi sarei aspettato approfondimenti maggiori anche perchè, per quel che è la mia esperienza, carri diversi rispondono in modo diverso sia in compressione che in ritorno, quindi spesso quello che si va a ricercare sul ritorno alle basse velocità è un valore effimero, che dipende si dal tipo di trail, ma anche e sopratutto dal tipo di carro, inoltre, posto che possiamo tarare il ritorno sulle basse per affrontare al meglio gli ostacoli più grandi, bisogna anche capire cosa si vuole, parlando di bike park ad esempio, sui salti, perchè ad esempio ritorni veloci che riportano a posto la ruota in fretta sullo scassato tosto, si riflettono poi in una tendenza a scalciare sui salti (cambio di frequenza)
In pratica, la cosa migliore sarebbe avere una telemetria in lettura che adegui il ritorno (e a quel punto anche la compressione) in base a come evolve il trail... studi già ci sono, vedi il progetto iSchock, ma fino a quando, secondo me, non si fa la lettura molto più anticipata, ad esempio con un laser che mappi le sconnessioni che la bici ancora deve affrontare, non raggiungeremo i livelli di quel che ad esempio era stato fatto in Formula1 ai tempi di Senna.
In questo forum già si grida allo scandalo per il cambio elettronico...
Tu stesso hai scritto un pistolotto (con motivazioni in buona parte condivisibili) contro il progetto dei mozzi che gonfiano automaticamente i copertoni, dicendo che basta fermarsi a gonfiare con la pompetta del Decathlon, e adesso vuoi la telemetria laser? ;)
Già che ci siamo perchè non degli innesti mentali che riproducono le capacità di guida dei migliori rider? Una bella schedina di memoria da infilare... boh, decidi tu, e zac! , ti ritrovi a saper guidare come Gwin o a fare i trick di MacAskill...")
Il Rapid recovery NON ESISTE, è solo una bella parola inventata dall'ufficio marketing di Rockshox, il sistema del ritorno è in tutto e per tutto uguale a quello usato dagli altri costruttori, ossia passaggio regolabile con spillo conico e pila di lamelle in parallelo.A me pare di aver capito che è meglio tenere un rebound un filo lento: aiuta in generale la stabilità della bici sugli urti e ostacoli medio grandi. Per il rotto veloce un pò aiutano cmq i sistemi tipo rapid recovery (senon sono presenti le ragolazioni delle alte velocità). Non ho capito un cacchio? =)
Ciao Fraski ! I really appreciate your interest and comments!Ciao AndreXTR!
Trovo il tuo approccio molto interessante, ma i contenuti sono pieni di errori, o forse semplificazioni, che portano a conclusioni sbagliate.
1. La regolazione che varia il coefficiente di smorzamento, e quindi la curva di risposta, non è solo il rebound, ma anche la compressione e per entrambi mi riferisco a quelli a 'bassa velocità'.
2. Il rebound alle alte velocità è quello che interviene solo quando la ruota si stacca da terra; il sistema dinamico in questo caso è completamente diverso, infatti la massa da considerare è quella di carro e ruota ossia quella che viene spinta verso il basso dalla molla della sospensione; la si chiude principalmente per evitare che la bici scaldo allo stacco dei salti, mentre la si apre per permettere alla sospensione di distendersi rapidamente.
3. Sugli urti ad alta frequenza, come una pietraia presa in velocità, è esperienza comune che si abbia più controllo chiudendo compressione e ritorno alle alte facendo galleggiare la bici, ovvero non permettendo alla sospensione di insaccarsi al momento dell'urto né di riestendersi tra un ostacolo è l'altro, cosicché in definitiva la ruota salta dalla cima di un ostacolo alla successiva.
4. Nella simulazione l'errore principale sta nel fatto che il manovellismo che simula il terreno è in grado anche di tirare verso il basso la massa che rappresenta la ruota+carro, fatto che in realtà ovviamente non succede.
Infine un errore veniale: la costante elastica delle molle ha dimensioni N/m e non N*m (che sono le dimensioni della coppia meccanica).
Se trovo il tempo nei prossimi giorni faccio delle simulazioni esplicative.
Ciao
(I will answer/discuss in english since my italian is very basic).
Yes, some simplifications were made on the video, however, in my best opinion, the simplifications don't affect the main messages, and I will explain why:
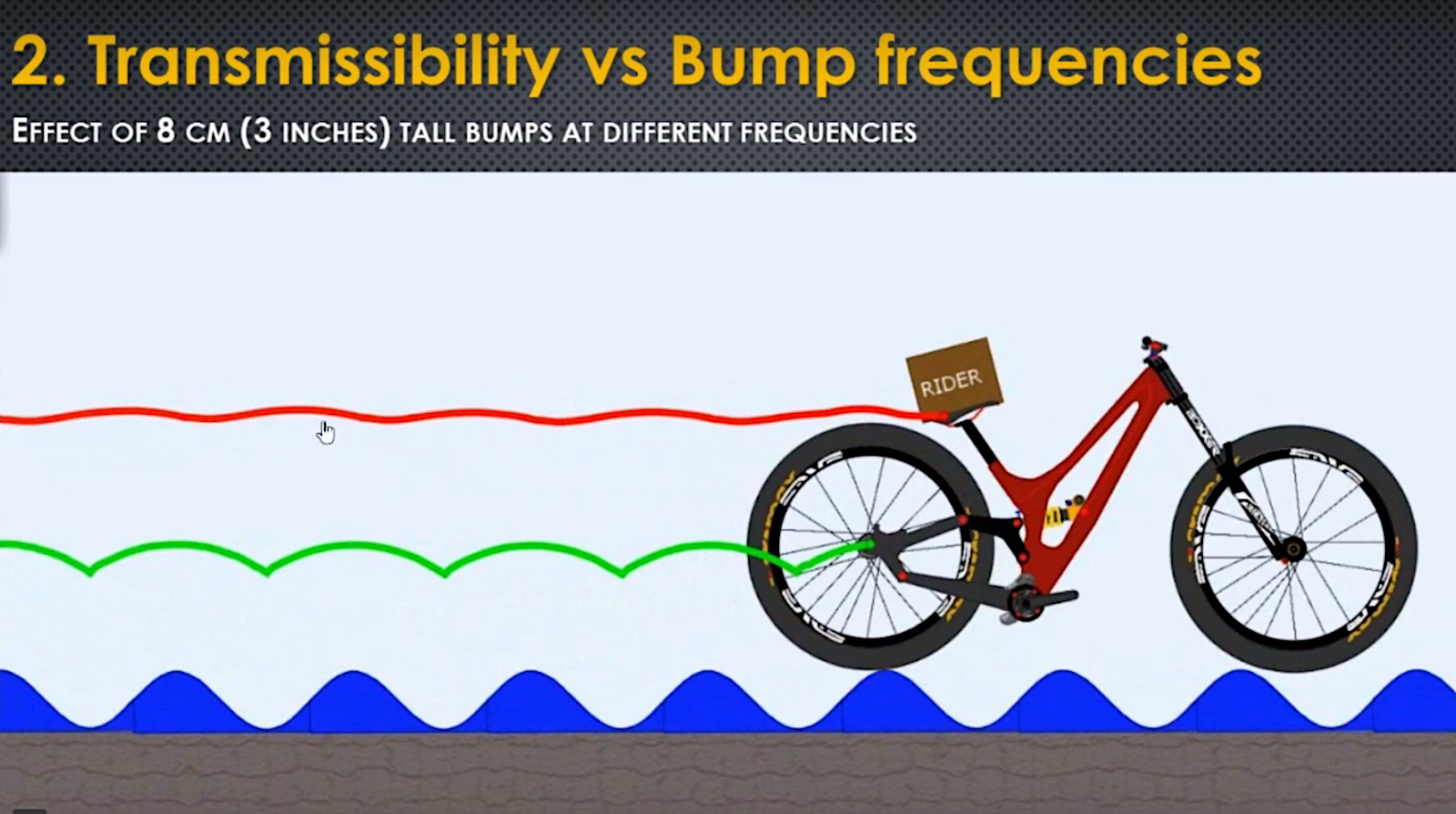
1) I didn't understand very well the point 1 (google translator is not great). But you talked about compression. In this video the compression was ignored as set to zero, since the video was about the rebound. The transmissibility graph is a textbook physics graph and it only considers the rebound (its shows the transmissibility of a simple spring-mass damped oscillator system for different rebound dampings). My simulation models were basically used to explain this graph in an visual and easy way to understand.
2) I also didn't understand this point very well, but the high-speed rebound mostly happens when the shock recovers from deep in the travel or after hitting a square edge bump at high-speeds (after the bump crest the wheel gets unloaded, sometimes leaving the ground, and at this point the spring will rebound fast since there is no resistance).
3) I'm not sure how you can setup the suspension to make the wheels jump from the top of an obstacle to the next one... If I understood well your point you think that it's better to use slow rebound and firm compression on rocky trails? In rocky trails In my opinion I think a faster rebound a low compression is the best in order to allow the wheel to track better the ground and isolate better the bumps, maximizing traction (and comfort).
4) I understand your point. The crankshaft model was the simplest and the most elegant model that I was able to create to explain visually the textbook transmissibility graph. The model behaves exactly as predicted by the transmissibility graphs, so although it's a simplification, it works well for the educational purposes. Anyway, I did another model where the "wheels" are separated from the ground and the conclusions are similar. On mid-frequencies (left) a quick rebound promotes instability (the wheels leave the ground and the suspended mass moves more than the bump - amplification). On the other hand a quick rebound isolates a bit better the faster bumps (right). So the conclusions are the same as the previous model.
5) Yes, it has a typo, didn't noticed that... it's indeed N/m not N*m. :)
Bye :)
Ups, I forgot to include the video link:Ciao Fraski ! I really appreciate your interest and comments!Ciao AndreXTR!
Trovo il tuo approccio molto interessante, ma i contenuti sono pieni di errori, o forse semplificazioni, che portano a conclusioni sbagliate.
1. La regolazione che varia il coefficiente di smorzamento, e quindi la curva di risposta, non è solo il rebound, ma anche la compressione e per entrambi mi riferisco a quelli a 'bassa velocità'.
2. Il rebound alle alte velocità è quello che interviene solo quando la ruota si stacca da terra; il sistema dinamico in questo caso è completamente diverso, infatti la massa da considerare è quella di carro e ruota ossia quella che viene spinta verso il basso dalla molla della sospensione; la si chiude principalmente per evitare che la bici scaldo allo stacco dei salti, mentre la si apre per permettere alla sospensione di distendersi rapidamente.
3. Sugli urti ad alta frequenza, come una pietraia presa in velocità, è esperienza comune che si abbia più controllo chiudendo compressione e ritorno alle alte facendo galleggiare la bici, ovvero non permettendo alla sospensione di insaccarsi al momento dell'urto né di riestendersi tra un ostacolo è l'altro, cosicché in definitiva la ruota salta dalla cima di un ostacolo alla successiva.
4. Nella simulazione l'errore principale sta nel fatto che il manovellismo che simula il terreno è in grado anche di tirare verso il basso la massa che rappresenta la ruota+carro, fatto che in realtà ovviamente non succede.
Infine un errore veniale: la costante elastica delle molle ha dimensioni N/m e non N*m (che sono le dimensioni della coppia meccanica).
Se trovo il tempo nei prossimi giorni faccio delle simulazioni esplicative.
Ciao
(I will answer/discuss in english since my italian is very basic).
Yes, some simplifications were made on the video, however, in my best opinion, the simplifications don't affect the main messages, and I will explain why:
1) I didn't understand very well the point 1 (google translator is not great). But you talked about compression. In this video the compression was ignored as set to zero, since the video was about the rebound. The transmissibility graph is a textbook physics graph and it only considers the rebound (its shows the transmissibility of a simple spring-mass damped oscillator system for different rebound dampings). My simulation models were basically used to explain this graph in an visual and easy way to understand.
2) I also didn't understand this point very well, but the high-speed rebound mostly happens when the shock recovers from deep in the travel or after hitting a square edge bump at high-speeds (after the bump crest the wheel gets unloaded, sometimes leaving the ground, and at this point the spring will rebound fast since there is no resistance).
3) I'm not sure how you can setup the suspension to make the wheels jump from the top of an obstacle to the next one... If I understood well your point you think that it's better to use slow rebound and firm compression on rocky trails? In rocky trails In my opinion I think a faster rebound a low compression is the best in order to allow the wheel to track better the ground and isolate better the bumps, maximizing traction (and comfort).
4) I understand your point. The crankshaft model was the simplest and the most elegant model that I was able to create to explain visually the textbook transmissibility graph. The model behaves exactly as predicted by the transmissibility graphs, so although it's a simplification, it works well for the educational purposes. Anyway, I did another model where the "wheels" are separated from the ground and the conclusions are similar. On mid-frequencies (left) a quick rebound promotes instability (the wheels leave the ground and the suspended mass moves more than the bump - amplification). On the other hand a quick rebound isolates a bit better the faster bumps (right). So the conclusions are the same as the previous model.
5) Yes, it has a typo, didn't noticed that... it's indeed N/m not N*m. :)
Bye :)
4) https://youtu.be/Q2_61PPGQoE
Hello! I'm sorry I was not able to fully understand what you said (google translator don't work very well), but I think you asked for more insights. If you are interested, I also discussed these topics on my episode 5 and 7. You also talked about telemetry, if you want, you can check episode 6 where it talks about a free telemetry method using a videocamera. (here's the link to the playlist https://www.youtube.com/playlist?list=PL4tH8eqoJoZ-puE8n0kDNVdCuKL7ySEAv)17 minuti per dire che la cosa migliore è avere
A: un ammo con regolazioni sulle alte e sulle basse anche per il ritorno
B: tarature quasi sempre veloci sulle alte e lavorare sulle basse in base alla tipologia del trail
Che è un po la base delle tarature, mi sarei aspettato approfondimenti maggiori anche perchè, per quel che è la mia esperienza, carri diversi rispondono in modo diverso sia in compressione che in ritorno, quindi spesso quello che si va a ricercare sul ritorno alle basse velocità è un valore effimero, che dipende si dal tipo di trail, ma anche e sopratutto dal tipo di carro, inoltre, posto che possiamo tarare il ritorno sulle basse per affrontare al meglio gli ostacoli più grandi, bisogna anche capire cosa si vuole, parlando di bike park ad esempio, sui salti, perchè ad esempio ritorni veloci che riportano a posto la ruota in fretta sullo scassato tosto, si riflettono poi in una tendenza a scalciare sui salti (cambio di frequenza)
In pratica, la cosa migliore sarebbe avere una telemetria in lettura che adegui il ritorno (e a quel punto anche la compressione) in base a come evolve il trail... studi già ci sono, vedi il progetto iSchock, ma fino a quando, secondo me, non si fa la lettura molto più anticipata, ad esempio con un laser che mappi le sconnessioni che la bici ancora deve affrontare, non raggiungeremo i livelli di quel che ad esempio era stato fatto in Formula1 ai tempi di Senna.
Any question you can send to [email protected] , I will try to help if possible :)
Bye!
Hi AndreXTR,Ups, I forgot to include the video link:Ciao Fraski ! I really appreciate your interest and comments!Ciao AndreXTR!
Trovo il tuo approccio molto interessante, ma i contenuti sono pieni di errori, o forse semplificazioni, che portano a conclusioni sbagliate.
1. La regolazione che varia il coefficiente di smorzamento, e quindi la curva di risposta, non è solo il rebound, ma anche la compressione e per entrambi mi riferisco a quelli a 'bassa velocità'.
2. Il rebound alle alte velocità è quello che interviene solo quando la ruota si stacca da terra; il sistema dinamico in questo caso è completamente diverso, infatti la massa da considerare è quella di carro e ruota ossia quella che viene spinta verso il basso dalla molla della sospensione; la si chiude principalmente per evitare che la bici scaldo allo stacco dei salti, mentre la si apre per permettere alla sospensione di distendersi rapidamente.
3. Sugli urti ad alta frequenza, come una pietraia presa in velocità, è esperienza comune che si abbia più controllo chiudendo compressione e ritorno alle alte facendo galleggiare la bici, ovvero non permettendo alla sospensione di insaccarsi al momento dell'urto né di riestendersi tra un ostacolo è l'altro, cosicché in definitiva la ruota salta dalla cima di un ostacolo alla successiva.
4. Nella simulazione l'errore principale sta nel fatto che il manovellismo che simula il terreno è in grado anche di tirare verso il basso la massa che rappresenta la ruota+carro, fatto che in realtà ovviamente non succede.
Infine un errore veniale: la costante elastica delle molle ha dimensioni N/m e non N*m (che sono le dimensioni della coppia meccanica).
Se trovo il tempo nei prossimi giorni faccio delle simulazioni esplicative.
Ciao
(I will answer/discuss in english since my italian is very basic).
Yes, some simplifications were made on the video, however, in my best opinion, the simplifications don't affect the main messages, and I will explain why:
1) I didn't understand very well the point 1 (google translator is not great). But you talked about compression. In this video the compression was ignored as set to zero, since the video was about the rebound. The transmissibility graph is a textbook physics graph and it only considers the rebound (its shows the transmissibility of a simple spring-mass damped oscillator system for different rebound dampings). My simulation models were basically used to explain this graph in an visual and easy way to understand.
2) I also didn't understand this point very well, but the high-speed rebound mostly happens when the shock recovers from deep in the travel or after hitting a square edge bump at high-speeds (after the bump crest the wheel gets unloaded, sometimes leaving the ground, and at this point the spring will rebound fast since there is no resistance).
3) I'm not sure how you can setup the suspension to make the wheels jump from the top of an obstacle to the next one... If I understood well your point you think that it's better to use slow rebound and firm compression on rocky trails? In rocky trails In my opinion I think a faster rebound a low compression is the best in order to allow the wheel to track better the ground and isolate better the bumps, maximizing traction (and comfort).
4) I understand your point. The crankshaft model was the simplest and the most elegant model that I was able to create to explain visually the textbook transmissibility graph. The model behaves exactly as predicted by the transmissibility graphs, so although it's a simplification, it works well for the educational purposes. Anyway, I did another model where the "wheels" are separated from the ground and the conclusions are similar. On mid-frequencies (left) a quick rebound promotes instability (the wheels leave the ground and the suspended mass moves more than the bump - amplification). On the other hand a quick rebound isolates a bit better the faster bumps (right). So the conclusions are the same as the previous model.
5) Yes, it has a typo, didn't noticed that... it's indeed N/m not N*m. :)
Bye :)
4) https://youtu.be/Q2_61PPGQoE
thank you for your reply!
Are you sure that the graph from the textbook considers only rebound damping and 0 compression damping? It seems to me the classical FRF of a second order oscillator that uses an only damping coefficient for both compression and rebound strokes. Also in your simulations, I don't see the expectable behavior of a system with different damping values for compression and extension (i.e. rebound) strokes; indeed in this case the oscillations shouldn't be symmetrical sinusoids, but asymmetrical waveforms. If my guess is right, it would explain also the similar output you get from simulations with wheels connected or not to the ground.
I hope this help to clarify my opinion I expressed in points 1 and 4 of previous post; on point 2 we are in perfect agreement: the high speed rebound acts only when there is no ground contact. While for the point 3, yes I think that for very high frequency obstacles you get better control and less resistance if you have firmer suspensions that allows the bike to ‘float’ over the obstacles instead of trying to keep the wheel always in contact with the ground. Of course a compromise is needed not to have an high transmission of all other kinds of bumps.
Since we are on an Italian forum I post in both languages. ;)
Sei sicuro che il grafico che hai preso dal libro di testo consideri solo lo smorzamento in estensione e nessuno smorzamento in compressione? Mi sembra la classica FRF di un oscillatore del secondo ordine che utilizza un unico coefficiente di smorzamento sia per la fase di compressione che quella di estensione. Anche nelle simulazioni, non vedo il comportamento atteso di un sistema con diversi valori di smorzamento per le fasi di compressione ed estensione (cioè rimbalzo); infatti in questo caso le oscillazioni non dovrebbero essere sinusoidi simmetriche, ma forme d'onda asimmetriche. Se la mia ipotesi è giusta, si spiegherebbe anche il risultato simile delle simulazioni con ruote collegate o meno al suolo.
Spero che questo sia di aiuto per chiarire la mia opinione che ho espresso nei punti 1 e 4 del post precedente; sul punto 2 siamo in perfetto accordo: il rimbalzo ad alta velocità agisce solo quando non c'è contatto con il terreno. Mentre per il punto 3, sì, penso che per gli ostacoli con frequenza molto alta si ottenga un controllo migliore e una minore resistenza se si settano le sospensioni più chiuse, che permette alla bici di 'galleggiare' sopra agli ostacoli, invece di cercare di mantenere la ruota sempre in contatto con il terreno. Naturalmente un compromesso è necessario per non avere una elevata trasmissione di tutti gli altri tipi di urti.
Ciao!
T
teoDH
Ospite
Un mozzo che gonfia una ruota è una cosa ben diversa da una sospensione attiva efficiente, e comunque non sono mai contro l'innovazione (un mozzo gonfiagomme è una cacata, non un innovazione), detto questo a me piacevano le F1 ai tempi di Lauda o Villeneuve, le moto ai tempi di Schwantz e Rainey e i rally ai tempi della S4...Eh? Addirittura una "telemetria laser anticipata" del trail per settare in tempo reale le sospensioni?!17 minuti per dire che la cosa migliore è avere
A: un ammo con regolazioni sulle alte e sulle basse anche per il ritorno
B: tarature quasi sempre veloci sulle alte e lavorare sulle basse in base alla tipologia del trail
Che è un po la base delle tarature, mi sarei aspettato approfondimenti maggiori anche perchè, per quel che è la mia esperienza, carri diversi rispondono in modo diverso sia in compressione che in ritorno, quindi spesso quello che si va a ricercare sul ritorno alle basse velocità è un valore effimero, che dipende si dal tipo di trail, ma anche e sopratutto dal tipo di carro, inoltre, posto che possiamo tarare il ritorno sulle basse per affrontare al meglio gli ostacoli più grandi, bisogna anche capire cosa si vuole, parlando di bike park ad esempio, sui salti, perchè ad esempio ritorni veloci che riportano a posto la ruota in fretta sullo scassato tosto, si riflettono poi in una tendenza a scalciare sui salti (cambio di frequenza)
In pratica, la cosa migliore sarebbe avere una telemetria in lettura che adegui il ritorno (e a quel punto anche la compressione) in base a come evolve il trail... studi già ci sono, vedi il progetto iSchock, ma fino a quando, secondo me, non si fa la lettura molto più anticipata, ad esempio con un laser che mappi le sconnessioni che la bici ancora deve affrontare, non raggiungeremo i livelli di quel che ad esempio era stato fatto in Formula1 ai tempi di Senna.
In questo forum già si grida allo scandalo per il cambio elettronico...
Tu stesso hai scritto un pistolotto (con motivazioni in buona parte condivisibili) contro il progetto dei mozzi che gonfiano automaticamente i copertoni, dicendo che basta fermarsi a gonfiare con la pompetta del Decathlon, e adesso vuoi la telemetria laser? ;)
Già che ci siamo perchè non degli innesti mentali che riproducono le capacità di guida dei migliori rider? Una bella schedina di memoria da infilare... boh, decidi tu, e zac! , ti ritrovi a saper guidare come Gwin o a fare i trick di MacAskill...
Infine, una sospensione che si adatta al trail non sostituirà mai il manico, quello o ce l'hai o non ce l'hai, ma non pensare che Gwin o altri vincano le gare solo grazie al manico, le tarature delle sospensioni sono fondamentali, e non facili da fare.
T
teoDH
Ospite
Wow, i've seen your YT channel, many compliments, you are doing a great job with those videos!Hello! I'm sorry I was not able to fully understand what you said (google translator don't work very well), but I think you asked for more insights. If you are interested, I also discussed these topics on my episode 5 and 7. You also talked about telemetry, if you want, you can check episode 6 where it talks about a free telemetry method using a videocamera. (here's the link to the playlist https://www.youtube.com/playlist?list=PL4tH8eqoJoZ-puE8n0kDNVdCuKL7ySEAv)17 minuti per dire che la cosa migliore è avere
A: un ammo con regolazioni sulle alte e sulle basse anche per il ritorno
B: tarature quasi sempre veloci sulle alte e lavorare sulle basse in base alla tipologia del trail
Che è un po la base delle tarature, mi sarei aspettato approfondimenti maggiori anche perchè, per quel che è la mia esperienza, carri diversi rispondono in modo diverso sia in compressione che in ritorno, quindi spesso quello che si va a ricercare sul ritorno alle basse velocità è un valore effimero, che dipende si dal tipo di trail, ma anche e sopratutto dal tipo di carro, inoltre, posto che possiamo tarare il ritorno sulle basse per affrontare al meglio gli ostacoli più grandi, bisogna anche capire cosa si vuole, parlando di bike park ad esempio, sui salti, perchè ad esempio ritorni veloci che riportano a posto la ruota in fretta sullo scassato tosto, si riflettono poi in una tendenza a scalciare sui salti (cambio di frequenza)
In pratica, la cosa migliore sarebbe avere una telemetria in lettura che adegui il ritorno (e a quel punto anche la compressione) in base a come evolve il trail... studi già ci sono, vedi il progetto iSchock, ma fino a quando, secondo me, non si fa la lettura molto più anticipata, ad esempio con un laser che mappi le sconnessioni che la bici ancora deve affrontare, non raggiungeremo i livelli di quel che ad esempio era stato fatto in Formula1 ai tempi di Senna.
Any question you can send to [email protected] , I will try to help if possible :)
Bye!
*thanyour english is absolutely ok for anyone who's not a native english speaker.Sorry, my english is not the best.... eheh :) Bye
easier to understand then native's too.
ho sempre sognato di correggere l'inglese di qualcun altro, grazie Fitz.
#maiunagioia