Eccoci alla seconda parte dell’articolo sui gruppi di sistemi di sospensione, nella quale approfondiremo gli elementi principali che determinano i sistemi Virtual Pivot.
Come già indicato nel precedente articolo in cui abbiamo approfondito le principali caratteristiche dei sistemi Single Pivot, l’obiettivo di questo articolo non è di eviscerare pregi o difetti dei vari sistemi che nomineremo, o di descriverne accuratamente il funzionamento, ma è quello di farne un catalogazione, netta e chiara, rispetto alla categoria di sospensione a cui appartengono. Questo ci permetterà di dipanare alcuni dubbi e di favorire la comprensione dei prossimi articoli che pubblicheremo a riguardo, in ciascuno dei quali analizzeremo un singolo sistema cinematico in modo più approfondito.
Virtual Pivot
I sistemi Virtual Pivot, conosciuti anche come infulcri virtuali, radunano tutti (o quasi) i sistemi che non possiamo classificare come Single Pivot. La caratteristica distintiva dei sistemi a fulcro virtuale, è quella di avere, contrariamente ai Single Pivot, uno snodo che interrompe la continuità del carro dall’infulcro principale alla ruota. Per realizzare quindi se ci troviamo dinanzi a un sistema Virtual Pivot, è sufficiente indivuare il braccio principale preposto a sostenere la ruota, che quindi ha funzione di carro. Se questo braccio risulta essere formato da due elementi, congiunti da uno snodo, ci troviamo di fronte a un sistema appartenente alla macrofamiglia dei Virtual Pivot.

Questo fondamentale snodo che troviamo nei sistemi Virtual Pivot, muta la caratteristica propria dei Single Pivot precedentemente descritta, in cui il percorso ruota descrive un arco di circonferenza il cui raggio è rappresentato dalla lunghezza stessa del carro, aprendo nuove possibilità di collocare virtualmente il centro di rotazione in un punto differente rispetto all’infulcro principale. Questo centro di rotazione è definito virtuale o flottante poichè varia la sua posizione durante il movimento del cinematismo e prende il nome di Istant Center (IC).
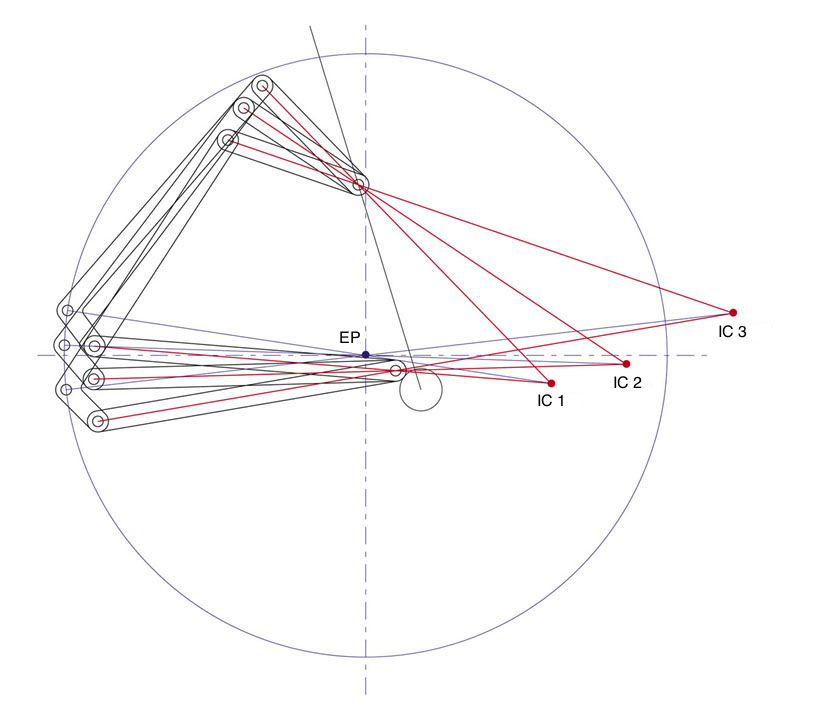
L’Istant Center si individua tramite due linee immaginarie, ciascuna delle quali tracciata attraverso i due punti di infulcro di ciascun leveraggio. Il punto in cui queste due rette si incrociano determina l’IC. Ovviamente durante la compressione del sistema di sospensione, la posizione dei links cambia e di conseguenza anche la posizione delle linee che ne interseca gli infulcri, quindi avremo un IC corrispondente alla sospensione a riposo, un altro IC corrispondente alla sospensione completamente compressa, e un infinito numero di IC nelle posizioni intermedie. Da qui il nome di Istant Center, poichè il centro è riconducibile alla posizione che il cinematismo ha in quel preciso istante.
Nella grafica di seguito vediamo rappresentati 3 punti differenti di IC, relativi a 3 posizioni differenti della sospensione. ICR 3 indica la sospensione a riposo, IC 1 la sospensione compressa e IC 2 una posizione intermedia. Dal punto di incrocio tra le linee tracciate tra ciascun IC e la rispettiva posizione dell’asse in quel momento, possiamo individuare il punto EP (Effective Pivot), che risulta essere il centro effettivo della sezione di circonferenza percorsa dalla ruota durante l’escursione.
La mobilità propria dell’IC, rispetto al punto fisso dei Single Pivot, permette ai progettisti di avere a disposizione più parametri per gestire le reciproche influenze tra sospensione e trasmissione. Per questo vantaggio, i sistemi Virtual Pivot trovano largo impiego nelle MTB a media escursione, dalle Trail Bike alle Enduro, dove l’equilibrio tra il comportamento della sospensione e quello della pedalata è determinante.
Le caratteristiche dell’IC consentono anche di valutare il miglior posizionamento dei leveraggi al fine di limitare l’influsso della frenata sul lavoro della sospensione, favorendo un movimento dell’elemento del carro su cui è montata la pinza freno, il più vicino possibile al valore neutro ottimale.
L’adozione dei links prevista nei sistemi Virtual Pivot, concede inoltre ampio spazio per gestire la curva di compressione con la quale viene azionato l’ammortizzatore.
Il primo progettista che intuì le potenzialità di un sistema Virtual Pivot fu Mert Lawwill, motociclista professionista e appassionato di MTB, che nel lontano 1991 applicò per la prima volta il suo omonimo brevetto su una bici in produzione, la Gary Fisher RS-1.

Lawwill si ispirò al sistema di sospensioni utilizzato sulle auto da corsa, adattandolo al progetto Mountain Bike. Inizialmente non ebbe molto successo per via dell’uso obbligato dei freni a disco (meccanici), che ai tempi risultavano eccessivamente pesanti e non vennero compresi e digeriti dalla maggior parte dei biker, fedeli ai loro Cantilever. Il sistema virtuale infatti non permetteva ai foderi di mantenere una posizione costante rispetto alla pista frenante del cerchio, di conseguenza non era possibile utilizzare freni Cantilever classici.
Alcuni anni dopo, nel 1996, Yeti utilizzò il brevetto di Lawwill per il suo modello da Downhill, la DH4. Questa sospensione risultò innovativa e ispirò importanti cambiamenti nel mondo delle MTB Full Suspended. Si trattava fondamentalmente di un sistema denominato “4-Bar” (4 bracci) con leveraggi lunghi. Il problema di questo sistema difatti era proprio la lunghezza dei leveraggi, che pagavano in termini di peso il dimensionamento necessario a renderli sufficientemente rigidi e robusti per non soffrire flessioni e torsioni.

Nel corso degli anni a venire, tutti i progettisti che hanno elaborato un sistema Virtual Pivot si sono ispirati a tutti gli effetti al brevetto di Mert Lawwill, cambiando però posizionamento e dimensionamento di leveraggi e snodi, non solo per ovviare al problema di flessione dei leveraggi così lunghi, ma anche per far convergere l’Istant Center anteriormente rispetto alla ruota posteriore, al fine di ottenere una resa migliore e più facilmente gestibile.
Il primo in ordine cronologico fu Horst Leitner, che nel 1993 applicò la sua soluzione sul primo prototipo Specialized FSR S-Works, registrando il brevetto il 9 Settembre 1994, che venne subito acquisito da Specialized, che lo detiene tuttora.
Il brevetto Horst prevede semplicemente il leveraggio su cui è assicurato l’asse della ruota più lungo rispetto a quello del brevetto Lawwill, mentre di conseguenza il leveraggio alto che va a comprimere l’ammortizzatore, diviene più corto rispetto a quello di Lawwill. Nella foto di seguito vediamo l’FSR (Horst) di Specy applicato sulla bici del 1998 del campione americano Shaun Palmer.

Le altre interpretazioni del sistema Virtual Pivot “4-Bar” prevedono invece due leveraggi corti in luogo di quelli lunghi utilizzati da Lawwill, che sostengono un carro formato da un vero e proprio triangolo solido, in sostituzione del piccolo leveraggio che nel brevetto Lawwill supporta l’asse della ruota.
Fanno parte di questo gruppo i sistemi denominati DW-Link, Maestro, Zero, FPS2 e numerosi altri, che si differenziano per il posizionamento dell’ammortizzatore e per dimensioni e posizione dei links, mentre come principio sono totalmente assimilabili tra loro.

Un sistema Virtual Pivot “4-Bar” a bracci corti che si distingue come progetto originale è il VPP (Virtual Pivot Point) di cui è proprietaria Santa Cruz. In questo caso i due links ruotano in senso inverso l’uno rispetto all’altro, generando un range di movimento dell’IC decisamente ampio, che offre la possibilità di essere largamente gestito dai progettisti. La particolarità di questo sistema inoltre è un percorso ruota che si discosta , solo nella parte iniziale, dalla classica forma a sezione di circonferenza, effettuando una piccola anteroflessione. Questa peculiarità fa assumere al percorso ruota una caratteristica forma a “S”. L’esempio più emblematico di VPP è sicuramente il V10c di Santa Cruz, discendente del V10 del 2001, sul quale per la prima volta fu applicato un sistema VPP.

Come per i Single Pivot, anche i Virtual Pivot possono essere attivati in modo “pull” piuttosto che in modo “push”. Lo stesso esempio della corda che abbiamo utilizzato nel precedente articolo sui Single Pivot, lo possiamo adattare ai Virtual Pivot, dove però l’applicazione risulta meno intuitiva. Nel caso dei sistemi Virtual Pivot, il tirante che dovremmo ipotizzare di sostituire con la suddetta corda è parte integrante del carro, quindi meno immediato da individuare. Due degli esempi più popolari di Virtual Pivot “pull” sono il V10 e il Demo. Nel primo caso, come possiamo vedere nella foto poco sopra, il tirante è rappresentato dal fodero basso del triangolo posteriore, che aziona la biella triangolare su cui è installato l’ammortizzatore. Nel caso del Demo di Specialized, il tirante è rappresentato dal pezzetto di carro compreso tra l’asse della ruota e lo snodo Horst, che va a tirare il triangolo inferiore del sistema Demo-FSR, sul quale è fissato l’ammortizzatore.

Il confronto con i corrispettivi sistemi in versione “push” lo possiamo effettuare all’interno della gamma delle stesse case produttrici, guardando i modelli di media escursione: la Bronson per quanto riguarda Santa Cruz e la Enduro per quanto riguarda Specialized. In entrambi i casi vediamo l’ammortizzatore chiaramente azionato per spinta dal carro.











